-
3D 데이터 획득
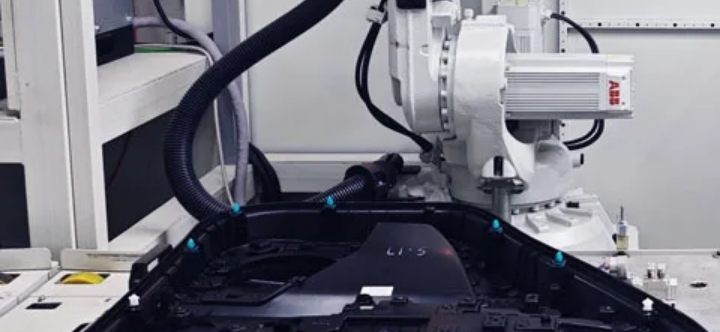
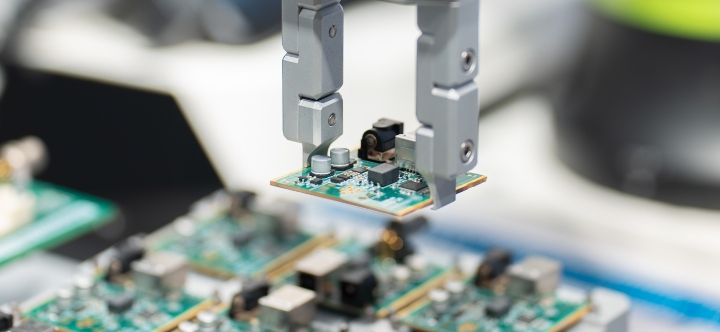
로봇 그리퍼에 장착된 3D 센서(Eye-in-Hand)가 작업 대상의 3차원 형상 데이터(Point Cloud)를 획득합니다. -
자동 캘리브레이션
센서와 로봇 간의 변환 행렬(Transformation Matrix)을 자동으로 계산하는 핸드-아이 캘리브레이션을 단시간 내에 고정밀로 수행합니다. -
VRC (Vision-guided Robot Control)
비전 시스템이 측정한 작업 대상의 6자유도(6DoF: 위치 3축, 자세 3축) 오차를 로봇 컨트롤러에 실시간으로 전달하여, 로봇 경로를 즉각적으로 수정 및 보정합니다. 이 실시간 피드백 루프를 통해 비정형 물체에 대한 작업 성공률이 획기적으로 향상됩니다.
PRINCIPLES
핸드-아이 캘리브레이션 및 실시간 보정
기존의 로봇 수동 프로그래밍 방식은 제조 현장에 심각한 문제점과 잠재적 손실을 유발합니다.
특히 유연성과 사용 용이성이 핵심인 협동로봇의 운용 환경에서 이 문제가 극대화됩니다.
특히 유연성과 사용 용이성이 핵심인 협동로봇의 운용 환경에서 이 문제가 극대화됩니다.